רובוט דלתא D3PM-1600-P3
מאפיין המוצר
מאפיין
1、זמן המחזור הסטנדרטי הוא פחות מ-0.4 שניות, עונה על השאיפה שלך למהירות הגבוהה ולנפח המינימלי.
2、 עיצוב מתקדם של המנוע הסיבובי על פלטפורמה נעה, מאפשר לרובוט להשיג דיוק סיבוב גבוה בקלות.
3、הרובוט אידיאלי לפעולות שטח צר, כמו גם למהירות גבוהה ודיוק גבוה בשדה 3C.בשימוש נרחב בהרכבה, טיפול ובדיקה של חלקי עבודה קטנים.
פרמטרים של מוצר
| סוּג | D3PM-1600-P3 | |
| צירים | 3+1 | |
| מטען | 3 ק"ג | |
| מניפולטור | מִשׁקָל | 79.7 ק"ג |
| קוֹטֶר | 1600 מ"מ | |
| הֲדִירוּת | עמדה | 0.05 מ"מ |
| רוֹטַציָה | 0.05° | |
| מהירות מקסימלית | 400 עמודים לדקה | |
| טווח סיבוב | ±360 | |
| מומנט אינרציה מרבי מותר | 31 × 10-4ק"ג .מ2 | |
| טווח זווית של זרוע מופעלת | לְמַעלָה | 22º |
| מטה | 76º | |
| ספק כוח | תלת פאזי 380VAC -10%~+10%, 49~61HZ | |
| קיבולת כוח | 10KVA | |
| כוח מדורג | 6.1 קילוואט | |
| טמפרטורת אחסון | -10℃~70℃ | |
| סביבת עבודה | -10℃~50℃,RH≤80% | |
| הֲגָנָה | IP55 | |
ציור מוצר
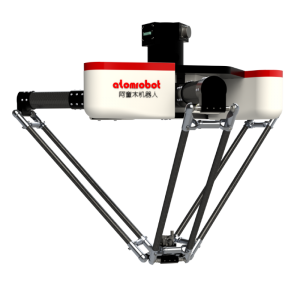
01. מידות וטווח עבודה (מ"מ)
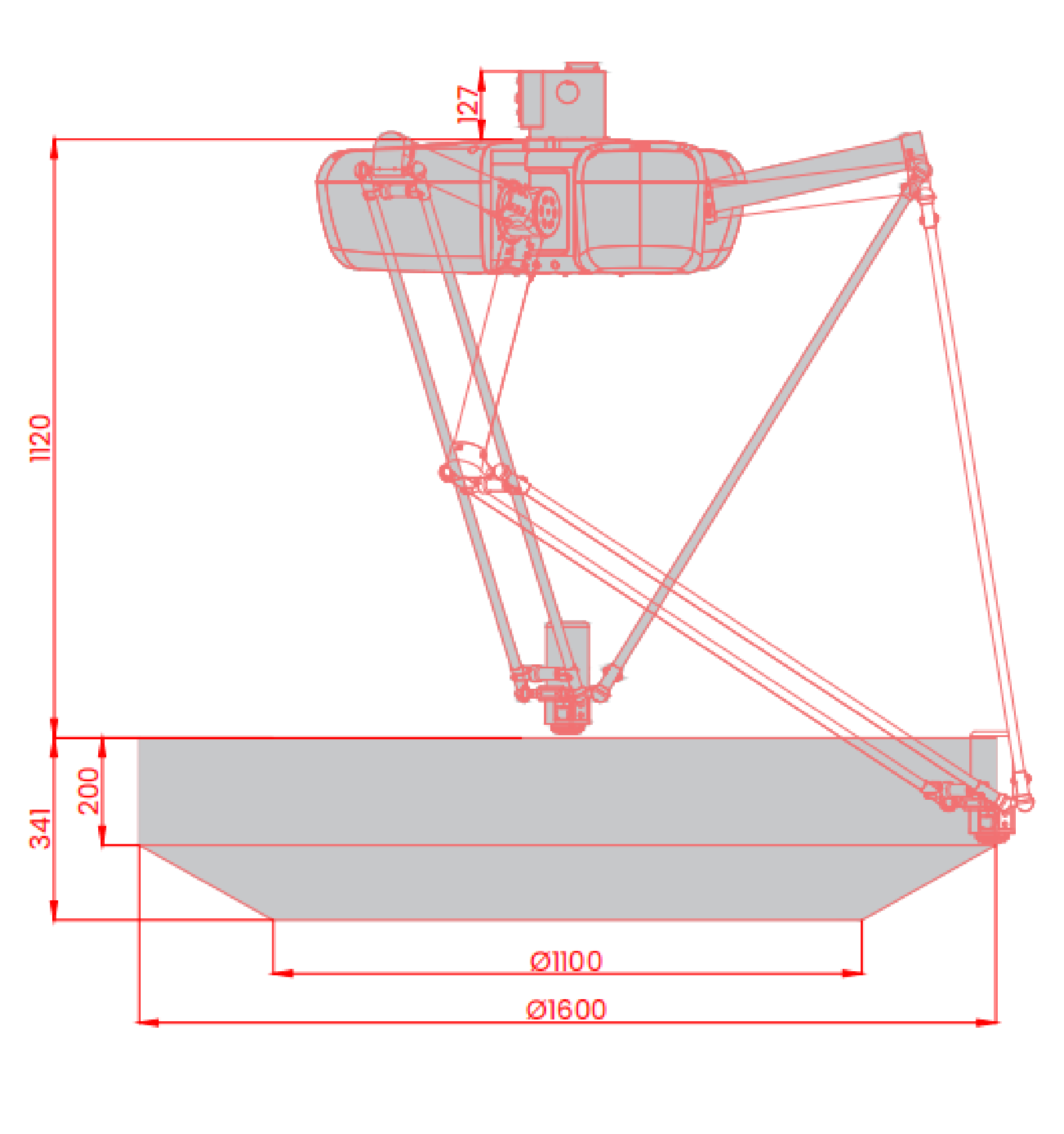
02. אוגן (מ"מ)
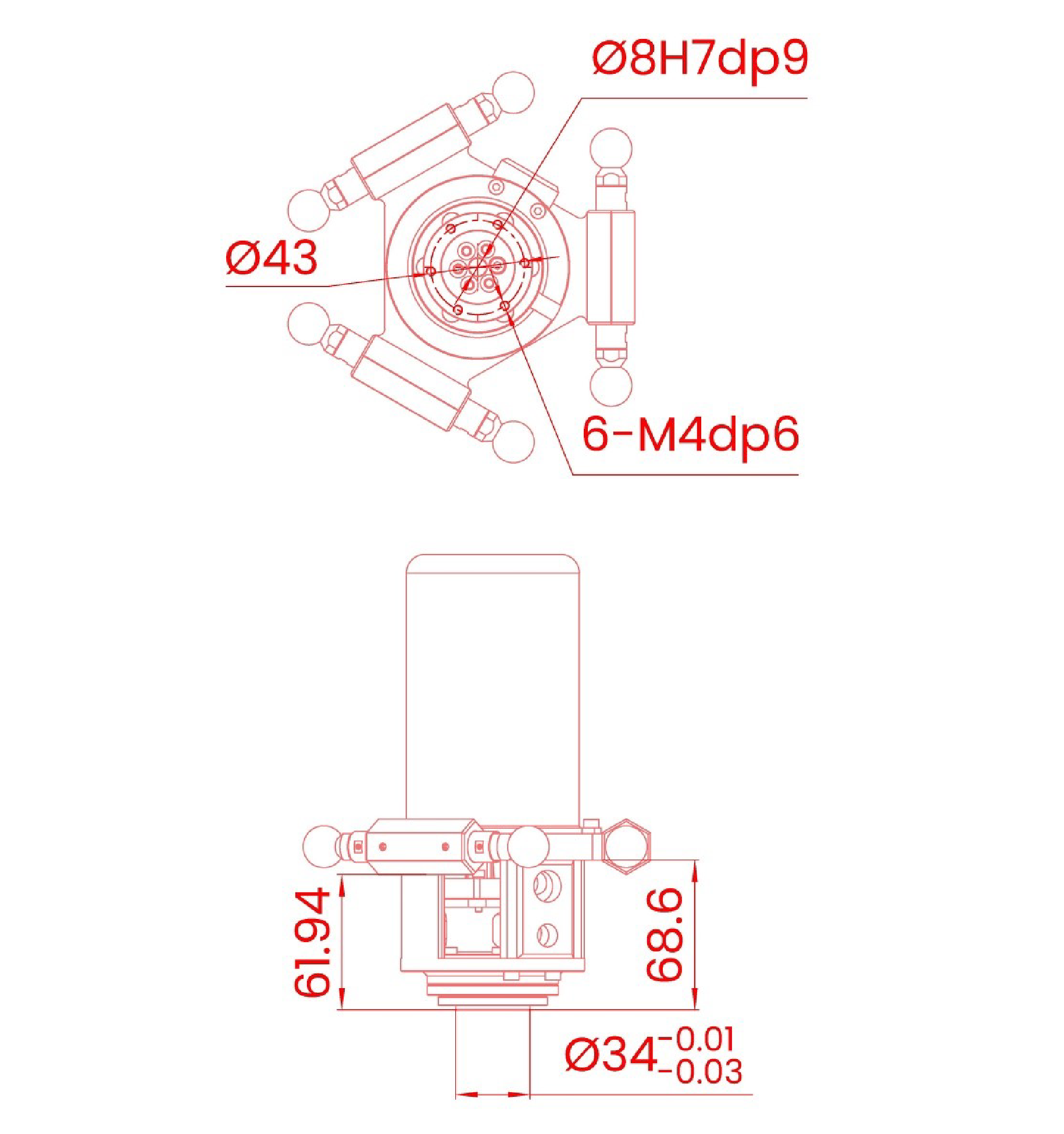
03. התקנת בסיס (מ"מ)
כתבו כאן את הודעתכם ושלחו אותה אלינו